Dersin slaytı için tıklayınız.
import cv2
import matplotlib.pyplot as plt
from PIL import Image
import numpy as np
from ultralytics import YOLO
import ultralytics
ultralytics.checks()
Ultralytics 8.3.103 Python-3.11.11 torch-2.6.0+cpu CPU (Intel Core(TM) i7-4702MQ 2.20GHz)
Setup complete (8 CPUs, 31.9 GB RAM, 851.2/931.2 GB disk)
model = YOLO("yolo12x.pt")
model.names
{0: 'person',
1: 'bicycle',
2: 'car',
3: 'motorcycle',
4: 'airplane',
5: 'bus',
6: 'train',
7: 'truck',
8: 'boat',
9: 'traffic light',
10: 'fire hydrant',
11: 'stop sign',
12: 'parking meter',
13: 'bench',
14: 'bird',
15: 'cat',
16: 'dog',
17: 'horse',
18: 'sheep',
19: 'cow',
20: 'elephant',
21: 'bear',
22: 'zebra',
23: 'giraffe',
24: 'backpack',
25: 'umbrella',
26: 'handbag',
27: 'tie',
28: 'suitcase',
29: 'frisbee',
30: 'skis',
31: 'snowboard',
32: 'sports ball',
33: 'kite',
34: 'baseball bat',
35: 'baseball glove',
36: 'skateboard',
37: 'surfboard',
38: 'tennis racket',
39: 'bottle',
40: 'wine glass',
41: 'cup',
42: 'fork',
43: 'knife',
44: 'spoon',
45: 'bowl',
46: 'banana',
47: 'apple',
48: 'sandwich',
49: 'orange',
50: 'broccoli',
51: 'carrot',
52: 'hot dog',
53: 'pizza',
54: 'donut',
55: 'cake',
56: 'chair',
57: 'couch',
58: 'potted plant',
59: 'bed',
60: 'dining table',
61: 'toilet',
62: 'tv',
63: 'laptop',
64: 'mouse',
65: 'remote',
66: 'keyboard',
67: 'cell phone',
68: 'microwave',
69: 'oven',
70: 'toaster',
71: 'sink',
72: 'refrigerator',
73: 'book',
74: 'clock',
75: 'vase',
76: 'scissors',
77: 'teddy bear',
78: 'hair drier',
79: 'toothbrush'}
Örnek 1
image = cv2.imread("zidane.jpg")
# Convert BGR to RGB (Matplotlib expects RGB)
image_rgb = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
# Display using Matplotlib
plt.figure(figsize=(10, 8))
plt.imshow(image_rgb)
plt.axis('off') # Hide axes
plt.show()
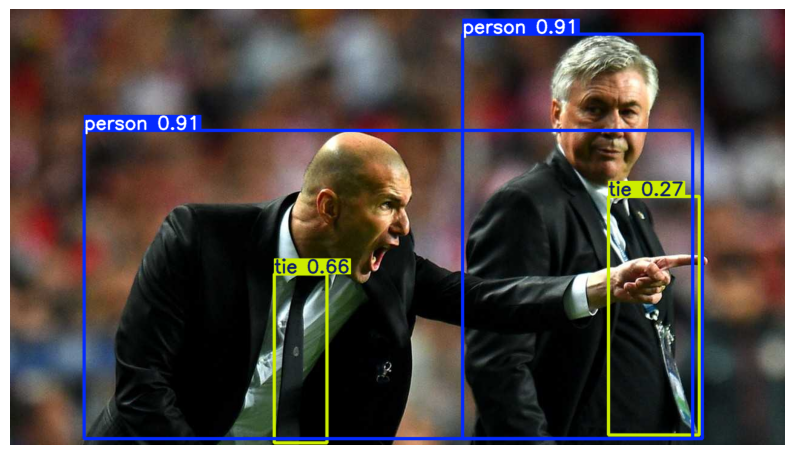
results = model.predict(source = image, classes=None)
0: 384x640 2 persons, 2 ties, 2335.0ms
Speed: 64.1ms preprocess, 2335.0ms inference, 176.1ms postprocess per image at shape (1, 3, 384, 640)
result = results[0]
# Convert the result to a numpy array (with bounding boxes plotted)
result_img = result.plot() # Returns a BGR numpy array
# Convert BGR to RGB (Matplotlib expects RGB)
result_img_rgb = result_img[..., ::-1]
# Display using Matplotlib
plt.figure(figsize=(10, 8))
plt.imshow(result_img_rgb)
plt.axis('off') # Hide axes
plt.show()
for box in result.boxes:
class_id = int(box.cls)
print(class_id, box.conf)
print(box.xywh)
0 tensor([0.9143])
tensor([[945.1121, 375.2975, 396.1606, 667.4927]])
0 tensor([0.9109])
tensor([[ 624.9501, 455.1218, 1005.7179, 509.7147]])
27 tensor([0.6578])
tensor([[480.0264, 577.1942, 86.1879, 278.4317]])
27 tensor([0.2715])
tensor([[1063.6444, 506.4780, 150.4771, 394.8727]])
Örnek 2
image = cv2.imread("bus.jpg")
# Convert BGR to RGB (Matplotlib expects RGB)
image_rgb = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
# Display using Matplotlib
plt.figure(figsize=(10, 8))
plt.imshow(image_rgb)
plt.axis('off') # Hide axes
plt.show()

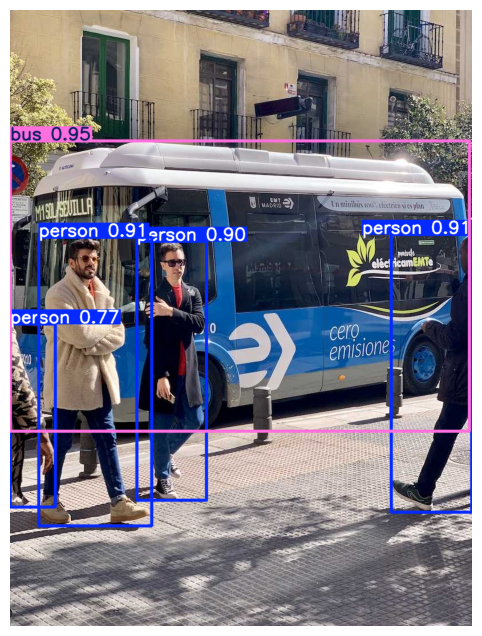
results = model.predict(source = image, classes=None)
0: 640x480 4 persons, 1 bus, 1480.9ms
Speed: 3.6ms preprocess, 1480.9ms inference, 61.8ms postprocess per image at shape (1, 3, 640, 480)
result = results[0]
# Convert the result to a numpy array (with bounding boxes plotted)
result_img = result.plot() # Returns a BGR numpy array
# Convert BGR to RGB (Matplotlib expects RGB)
result_img_rgb = result_img[..., ::-1]
# Display using Matplotlib
plt.figure(figsize=(10, 8))
plt.imshow(result_img_rgb)
plt.axis('off') # Hide axes
plt.show()
for box in result.boxes:
class_id = int(box.cls)
print(f"{model.names[class_id]}", box.conf)
print("koordinatlar:",box.xywh)
bus tensor([0.9530])
koordinatlar: tensor([[403.3855, 483.9154, 804.8208, 509.4446]])
person tensor([0.9104])
koordinatlar: tensor([[149.3938, 651.5845, 198.0223, 506.2278]])
person tensor([0.9101])
koordinatlar: tensor([[739.1487, 636.9462, 140.9246, 487.0843]])
person tensor([0.8968])
koordinatlar: tensor([[283.7622, 632.6006, 121.6693, 453.8922]])
person tensor([0.7726])
koordinatlar: tensor([[ 39.8363, 710.8444, 79.2513, 321.4905]])
result = model.predict(source = "bus.jpg", classes = [0,1], save=True)
image 1/1 D:\Drive\Python jupyter\63 makine ogrenmesine giris\08 yolo\bus.jpg: 640x480 4 persons, 1310.8ms
Speed: 3.2ms preprocess, 1310.8ms inference, 59.6ms postprocess per image at shape (1, 3, 640, 480)
Results saved to [1mD:\Desktop\mediapipe_yolo\runs\detect\predict2[0m
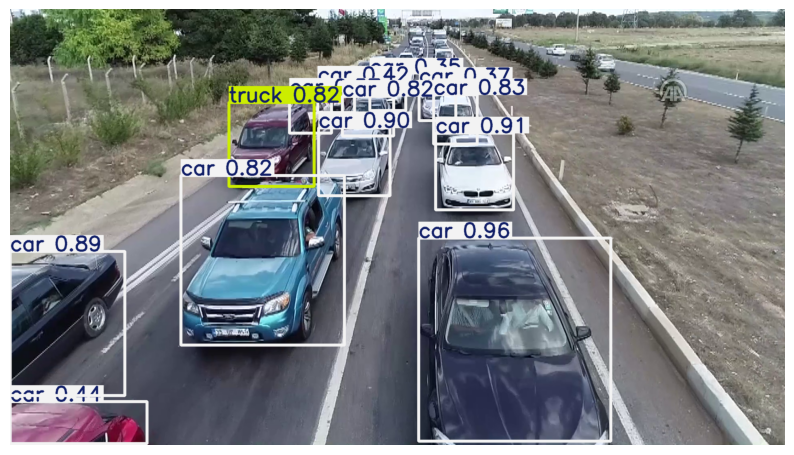
Örnek 3
image = cv2.imread("trafik.png")
# Convert BGR to RGB (Matplotlib expects RGB)
image_rgb = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
# Display using Matplotlib
plt.figure(figsize=(10, 8))
plt.imshow(image_rgb)
plt.axis('off') # Hide axes
plt.show()

results = model.predict(source = image, classes=None)
0: 384x640 12 cars, 1 truck, 687.1ms
Speed: 2.4ms preprocess, 687.1ms inference, 1.1ms postprocess per image at shape (1, 3, 384, 640)
result = results[0]
# Convert the result to a numpy array (with bounding boxes plotted)
result_img = result.plot() # Returns a BGR numpy array
# Convert BGR to RGB (Matplotlib expects RGB)
result_img_rgb = result_img[..., ::-1]
# Display using Matplotlib
plt.figure(figsize=(10, 8))
plt.imshow(result_img_rgb)
plt.axis('off') # Hide axes
plt.show()
for box in result.boxes:
class_id = int(box.cls)
print(f"{model.names[class_id]}", box.conf)
print("koordinatlar:",box.xywh)
car tensor([0.9552])
koordinatlar: tensor([[1250.7148, 819.1711, 476.4030, 502.7913]])
car tensor([0.9107])
koordinatlar: tensor([[1150.9282, 402.8623, 193.0745, 189.7846]])
car tensor([0.8962])
koordinatlar: tensor([[853.3105, 378.6116, 176.7790, 168.6751]])
car tensor([0.8917])
koordinatlar: tensor([[142.6972, 778.8400, 284.1820, 357.2256]])
car tensor([0.8271])
koordinatlar: tensor([[1103.7988, 273.6544, 107.9731, 122.5540]])
car tensor([0.8225])
koordinatlar: tensor([[626.0502, 622.6163, 404.9084, 420.1051]])
car tensor([0.8196])
koordinatlar: tensor([[887.0615, 265.1755, 127.0098, 97.6685]])
truck tensor([0.8191])
koordinatlar: tensor([[647.8918, 335.5568, 211.6077, 207.6706]])
car tensor([0.5713])
koordinatlar: tensor([[744.5760, 259.5199, 104.4468, 96.4187]])
car tensor([0.4429])
koordinatlar: tensor([[ 170.1676, 1024.7543, 338.6647, 103.8378]])
car tensor([0.4180])
koordinatlar: tensor([[807.8351, 218.9442, 91.4066, 74.4459]])
car tensor([0.3711])
koordinatlar: tensor([[1059.0259, 230.3790, 90.1514, 92.7541]])
car tensor([0.3516])
koordinatlar: tensor([[935.8292, 206.8743, 88.9178, 90.2407]])
Örnek 4
results = model.predict(source = "video.mp4", save = True)
Kaynaklar:
- https://docs.ultralytics.com/tr
- https://www.youtube.com/@Ultralytics/videos